现在科技哀求加速度传感器廉价、性能优胜、易于大批量生产。在诸如军工、空间系统、科学丈量等领域,须要利用体积小、重量轻、性能稳定的加速传感器。以传统加工方法制造的加速传感器难以全面知足这些哀求。于是运用新兴的微机器加工技能制作的微加速度传感器应运而生。这种传感器体积小、重量轻、功耗小。启动快、本钱低、可靠性高、易于实现数字化和智能化。而且,由于微机器构造制作精确、重复性好、易于集成化、适于在批量生产,它的性能价格比很高。可以预见在不久的将来,它将在加速传感器市场中占主导地位。
微加速度传感器有压阻式、压电式、电容式等形式。

压电式传感器是利用弹簧质量系统事理。敏感芯体质受振动加速度浸染后产生一个与加速度成正比的力,压电材料受此力浸染后沿其表面形成 与这一力成正比的电荷旗子暗记。压电式加速度传感用具有动态范围大、频率范围宽、坚固耐用,受外界是滋扰性小以及压电材料受力自觉生电荷旗子暗记不须要任何外界电源等特点,是被最为广泛利用的振动丈量传感器。虽然压电式加速度传感器的构造大略,商业 化利用也很长,但因其性能指标与材料特性、设计和加工工艺密切干系,因此在市场上发卖的同类传感器性能的实际参数以及其稳定性和同等性差别非常大。与压阻和电容式比较,其最大的缺陷是压电式加速度传感器不能丈量零频率的旗子暗记。

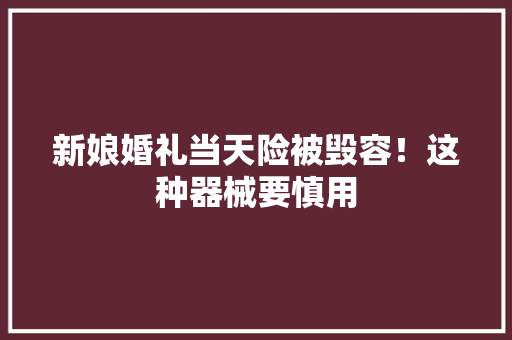
压电式加速度传感器的构造如图
压电式加速度传感器的构造如图所示。在两块表面镀银的压电晶片(石英晶体或压电 陶瓷)间夹1片金属薄片,并引出输出旗子暗记的引线。在压电晶片上放置1块质量块,并用硬弹簧对压电元件施加预压缩载荷。静态预载荷的大小应远大于传感器在振动、冲击测试中可能承受最大动应力。这样,当传感器向上运动时,质量块产生的惯性力使压电元件上的压应力增加;反之,当传感器向下运动时,压电 元件的压应力减小,从而输出 与加速度成正比例的电旗子暗记。
传感器全体组件装在一个原基座上,并用金属壳体加以封罩。为了隔离试件的任何应变通报到压电元件上去,基座尺寸较大。测试时传感器的基座与测试件刚性连接。当测试的振动频率远低于传感器的谐振频率时,传感器输出电荷(或电压)与测试件的加速度成正比,经电荷放大器或电压放大器即可测出加速度。
应变压阻式加速度传感器的敏感芯体为半导体材料 制成电阻丈量电桥,其构造动态模型仍旧是弹簧质量系统。当代微加工制造技能的发展使压阻形式敏感芯体的设计具有很大的灵巧性以适宜各种不同的丈量哀求。在灵敏度和量程 方面,从低灵敏度高量程的冲击丈量,至直流高灵敏度的低频丈量都有压阻形式的加速度传感器。同时压阻式加速度传感器丈量频率范围也可从直流旗子暗记到具有刚度高,丈量频率范围到几十千赫兹的高频丈量。超小型化的设计也是压阴式传感器的一个亮点。须要指出的是只管压阻敏感芯体的设计和运器具有很大灵巧性,但对某个特定设计的压阻式芯体而言利用范围一样平常要小于压电型传感器。压阻式加速度传感器的另一缺陷是受温度的影响较大,实用的传感器一样平常都须要进行温度补偿。在价格方面,大批量利用的压阻式传感器本钱价具有很大的市场竞争力,但对分外利用的敏感芯系统编制造本钱将远高于压电型加速度传感器。
电容型加速传感器的构造形式一样平常也采取弹簧质量系统。当质量受加速浸染运动而改变质量块与固定电极之间的间隙进而使电容值变革。电容式加速度计与其它类型的加速度传感器比较具有灵敏度高、零频相应、环境 适应性好等特点,尤其是受温度的影响比较小;但不敷处表现在旗子暗记的输入与输出为非线性,量程有限,受电缆的电容影响,以及电容传感器本身是高阻抗旗子暗记源,因此电容传感器的输出旗子暗记每每需通过后继电路给于改进。在实际运用 中电容式加速度传感器较多地用于低频丈量,其通用性不如压电式加速度传感器,且本钱也不双压电式加速度传感器高得多。
加速度传感器可运用掌握,手柄振动和扭捏,仪器仪表,汽车制动启动检,地震检测,报警系统,玩具,构造物、环境监测、工程监测、地质勘探、铁路、桥梁、大坝的振动测试与剖析;鼠标、高层建筑构造动态特性和安全保卫振动侦察上。
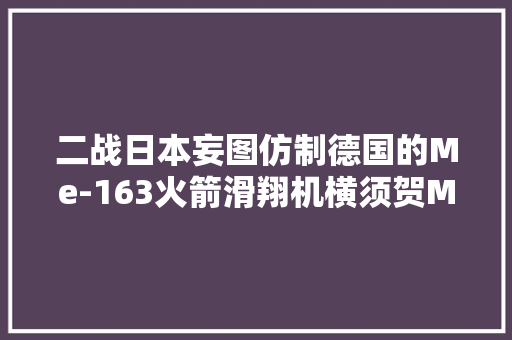
目前,大部分设备都供应了可以检测各个方向的加速度传感器。以IOS设备为例,我们利用了其三轴加速度传感器(x,y ,z轴代表方向如图)的特性来剖析。分别用以检测人步辇儿中三个方向的加速度变革。
三轴加速度传感器示意图
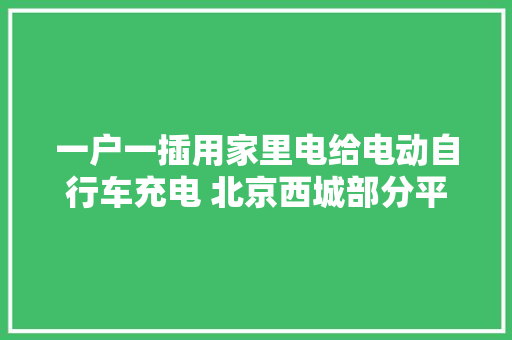
用户在水平步走运动中,垂直和提高两个加速会呈现周期性变革,如图所示。在步辇儿收脚的动作中,由于 重心向上单只脚触地,垂直方向加速度是正向增加的趋势,之后连续向前,重心下移两脚触底,加速度相反。 水平加速度在收脚时减小,在迈步时增加。
反响到图表中,可以看到,在步走运动中,垂直和提高产生的加速度与韶光大致为一个正弦曲线,而且在某点一个峰值。个中,垂直方向的加速度变革最大,通过对轨迹的峰值进行检测打算和加速度阀值决策,即可实时打算用户运动的步数,还可依此进一步估算用户步辇儿间隔。
计步的合理算法
由于用户在运动中可能用手平持设备,或者将设备置于口袋中。以是,设备的放置方向不定。为此,通过打算三个加速度的矢量长度,我们可以得到一条步走运动的正弦曲线轨迹。第二步是峰值检测,我们记录了上次矢量长度和运动方向,通过矢量长度的变革,可以判断目前加速度的方向,并和上一次保存的加速度方向进行比较。如果是相反的,即是刚通过峰值状态,刚进入计步逻辑进行计步,否则舍弃。通过对峰值的次数累加,可得到用户步辇儿的步伐。
末了,便是去滋扰。手持设备 会有一些低幅度和快速的抽动状态,或是我们俗称的手抖,或者某个恶作剧用户想通过短时快速反复摇动设备来仿照人走路,这些滋扰数据如果不剔除,会影响记步的准确值,对付这种滋扰,我们可以通过给检测加上阀值和步频判断来过滤。