CAN 是 Controller Area Network 的缩写(以下称为 CAN),是 ISO国际标准化的串行通信协议。在当前的汽车家傍边,出于对安全性、舒适性、方便性、低公害、低本钱的哀求,各种各样的电子掌握系统 被开拓了出来。由于这些系统之间通信所用的数据类型及对可靠性的哀求不尽相同,由多条总线构成的情形很 多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个 LAN,进行大量数据的高速通信”的需 要,1986 年德国电气商博世公司开拓出面向汽车的 CAN 通信协议。此后,CAN 通过 ISO11898 及 ISO11519 进 行了标准化,现在已是汽车网络的标准协议。
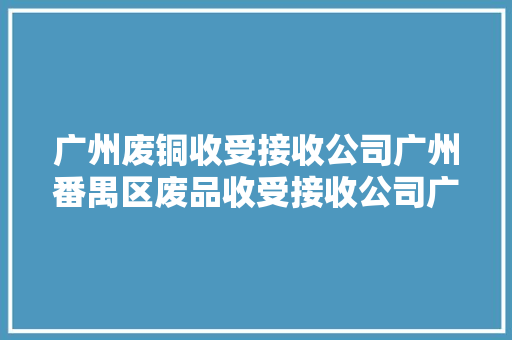
图1 车载网络示意图

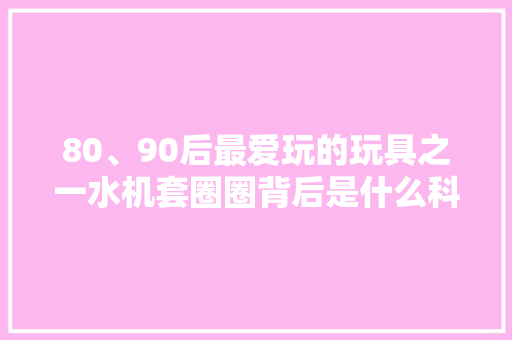
图2 CAN 的运用示意图

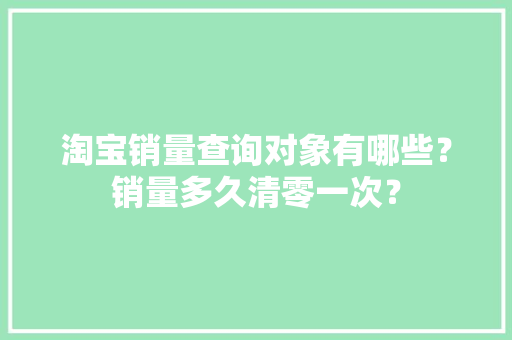
CAN 掌握器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变革,将发送给吸收方。
图3 CAN 拓扑构造示意图
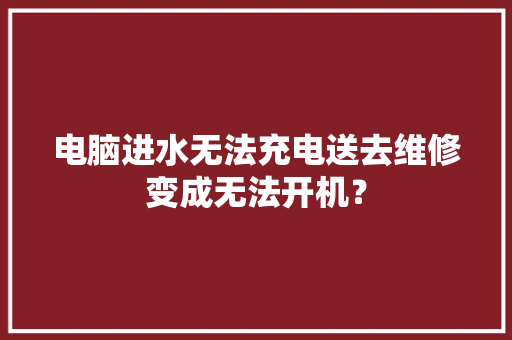
xPedition AMS在任何抽象级别和设计过程中的任何阶段进行多学科系统建模和剖析,包括:
n 事理图设计与设计流程整合
n 多学科模型支持
n 模型获取和创建
n 波形查看
n 参数/数据后处理
图4 xPedition AMS集成多学科
2020年7月17日晚20:00-21:30,西门子业务部门Mentor电子板级系统分部的运用工程师Colin Zhou将为您讲解:
1) 模数稠浊电路面临的寻衅及应对策略
2) xPedition AMS简介
3) 运用AMS进行汽车CAN总线仿真剖析流程简介
4) CAN总线长度及拓扑构造剖析
5) CAN总线电路电源仿真优化剖析
Colin Zhou拥有多年板级电子系统设计的履历。加入Mentor之前曾在Lumentum担当资深硬件工程师,卖力板级系统设计,包括电路设计、旗子暗记仿真剖析、高速高密PCB设计等事情。
欢迎点击下方理解更多报名参与这次研讨会。