【导读】:
软机器人技能不仅可以用作实现新颖,更逼真的运动形式的手段,而且还可以作为通过利用机器人模型动物来理解繁芜生物力学的工具。在此,通过利用拮抗的Fast-PneuNet致动器和嵌入硅树脂通道中的超弹性共晶镓-铟(eGaIn)进行应变传感,先容了一种对完备优柔的机器人亚纲生鱼的波动机制的掌握。为了设计掌握器,开拓了一种大略的,数据驱动的集总参数方法,该方法许可利用实验数据和遗传算法进行精确但轻量的仿真。该模型可以准确地预测机器人在一系列驱动频率和一系列压力幅度下的行为,包括对软实行器进行拮抗共紧缩的影响。

这项研究的参与者来自德国马克斯·普朗克智能系统研究所,首尔国立大学和哈佛大学。他们创造了一个以鱼为灵感的身体强壮的机器人,该机器人能够抵抗流过水箱的水流在原地拍浮。

软机器鱼设计
沿着机身两侧的一系列相连的硅胶腔室,使它起伏不定的拍浮运动成为可能。空气交替地从一侧泵入腔室,从另一侧泵入腔室–这导致充气侧膨胀并向外波折,而放气侧向内卷曲。
机器人的侧线系统由两个液态金属添补的硅树脂微通道组成,沿每个侧面的长度延伸。当这些通道中的每一个在主体的那侧波折时伸展时,内部液态金属的电阻增加。因此,通过监视电阻的变革,可以确定给定的气压导致机器人身体起伏的程度。
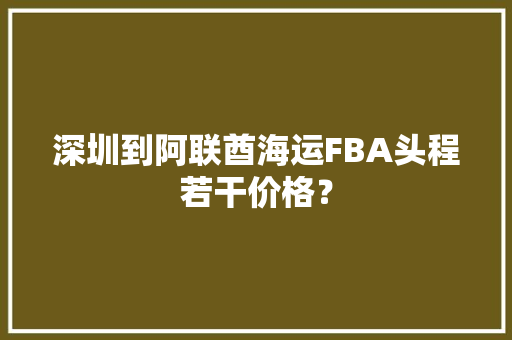
机器人的俯视图,将其自身对着流动的水。
该鱼有一个称为侧身的感知系统,可以使它们检测水中的运动,振动和压力梯度。现在,科学家已经给机器鱼授予了该系统自己的版本,让它可以确定最佳的拍浮速率。
机器鱼的每一侧都衬有由类似橡胶的小硅胶腔室制成的优柔的人造肌肉。通过这些口袋,研究职员在每一侧交替运送空气。当一侧的气穴膨胀时,它们会产生曲率,使另一侧的气穴紧缩。这会导致机器鱼向右和向左波折,使其尾巴摆动,类似于真实鱼看到的波浪状运动模式。
为了丈量波折度,科学家们嵌入了最前辈的软应变传感器,该传感器由一薄层有风微通道组成,该微通道充满液态金属并封装在硅树脂中。现在就像电线一样,可以像电话线一样延伸到900%的长度。空气对实行器的每个硅树脂腔加压得越多,传感器放置在弯头上方的次数就越多,并且其液态金属"金属丝"被拉长。然后,科学家将传感器连接到欧姆表以丈量电阻。拉伸伸长率越大,"线"内的电阻越高。该数字为科学家供应了在一定气压变革下其鱼身的波折度如何变革的数据。
然后,科学家将这种机器鱼平台放在水箱中的水下。在几个实验中,他们测试了气压掌握器如何从传感器中读取读数以丈量机器人的拍浮性能–一个信息回路,该旗子暗记回路向掌握器内部供应了一种自学习算法,以将适量的空气通过气动装置推入。口袋,因此拍浮可以完美地适应不同的水流速率。
该软传感器为一种全新的设计技能, "超弹性液态金属应变传感器"。
它们是由Park Yong-Lae Park教授及其在首尔国立大学的团队以及哈佛大学的Daniel Vogt共同开拓的,是一项真正的创新。"在生物学以及软机器人技能中,拥有一个完备软的机器人,我们拥有无限的自由度。这意味着身体的任何部位都可能变形。很难估计鱼的形状是如何变革的,由于我们不能在鱼身上安装无限数量的传感器,由于只有枢纽关头数量有限的刚性机器人才可以做到。"
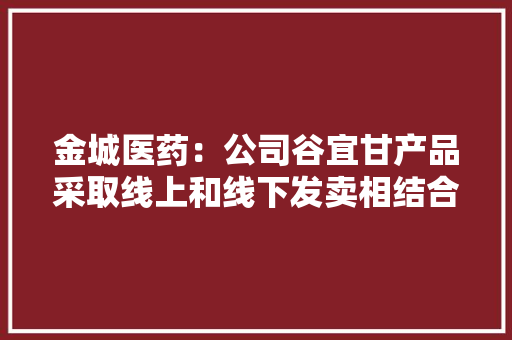
软机器鱼与液态金属软传感器
A)一条充气的软鱼在水箱中拍浮,标有关键组件。软传感器放置在PneuNet实行器的外部边缘上,以供应反馈。B)中线运动学示例快照,该反馈掌握器可调节机器人的拍浮幅度。每个图以1 Hz的驱动频率绘制20条中线,相距50 ms。
弹性应变传感器性能
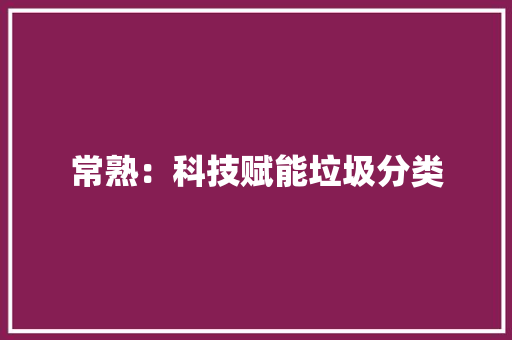
对连接到软机器人物理模型的eGaIn传感器进行了测试(见下图),结果表明该传感器能够实时捕获鱼的偏转。与摄像的地面运动学比较,传感器的相应是线性的(R 2 = 0.952,),相对偏差可以通过高斯噪声很好地建模,标准偏差为0.4%。
超弹性eGaIn传感器性能。A)传感器读数的韶光进程与拍照术的运动学之间的关系。B)传感器线性度,在1 Hz的起伏1 s内以100 Hz采样。C)传感器偏差直方图,具有拟合的高斯分布。
传感器上的噪声并非来自传感器本身,当在拉力试验机中利用高分辨率仿照输入进行丈量时,其噪声阻抗变革较小。由于传感器的性能与温度有关,因此必须把稳所有实验均在室温下进行。相反,噪声来自所用微掌握器的模数转换器(ADC)的分辨率有限(10位),以及来自流体反应和所安装的气动实行器变形对传感器产生的额外压缩应变的影响。到。但是,传感器仍远低于噪声水平,这将妨碍全体系统的可控性。经由数周的连续测试后,传感器仍保持功能正常,这表明传感用具有良好的耐疲倦性。
反馈掌握器性能
建立了良好的模型和传感器性能后,我们在Simulink(Matlab R2020a)中对振幅掌握系统进行了原型设计(包括传感器噪声的影响)。为了从振荡应变旗子暗记创建可控参考,我们每半个周期提取一次最大振幅,在波折角度超越零的每个点处更新偏差旗子暗记。我们利用比例积分微分(PID)掌握器来相应测得的振幅来调度压力。
该模型使我们能够在不增加硬件风险的情形下快速调度增益,并检讨传感器噪声的影响。我们创造,该掌握器对噪声水平的鲁棒性远高于传感器数据中不雅观察到的偏差水平。掌握器对一系列步进输入的相应,其噪声与起伏期间从eGaIn传感器测得的噪声水平相称。
"我们开拓了一种流体动力学模型,可以预测我们的软机器人鱼的行为。这是建立在以前的创造的根本上的,在该创造中,我们通过共同紧缩和身体僵硬来丈量拍浮时的峰值推力,并测试了软传感器前馈颠簸。通过本体感想熏染性软觉得反馈来闭合环路,使机器人能够相应不同的流动条件。" Ardian Jusufi阐明说。他是该出版物的相应作者,专门研究软活性物质,仿生物和机器人技能。Jusufi是MPI-IS的"马克斯·普朗克数码谷"研究小组卖力"生物机器人和体细胞系统的运动"的卖力人。"我们的项目建立在先前关于软性机器人和拍浮机器人的生物机器人建模的几篇互助论文的根本上。为了推进建模和闭环掌握,我们的团队结合了来自三大洲的软机器人专业知识。"
技能展望:
"这种机器人将使我们能够测试和完善关于拍浮动物神经力学的假设,并帮助我们改进未来的水下机器人," Jusufi连续说道。除了首次在水下动态条件下表征软应变传感器外,我们还开拓了一种大略而灵巧的数据驱动建模方法,以设计我们的拍浮反馈掌握器。该模型将引起科学界的兴趣,并将有助于加快软机器人设计和操作的未来事情。在即将进行的研究中,我们还将在地面机器人中利用软应变传感器,该传感器可以爬升并战胜繁芜的障碍。"
理解诸如鱼类之类的优柔动物如何游动的潜在机制有助于设计人造的优柔构造,并使其可以用来构建机器人。这种受动物启示的机器人有一天可以用来探索海洋深处,并供应有代价的海洋生物数据,避免产生噪音,并减少传统的刚性推进式潜艇面临的纠缠风险。拍浮机器人也可以成为更节能的选择,这便是为什么越来越多的科学家在开拓软致动器和传感器上投入大量精力的缘故原由,这些致动器和传感器通过复制水生脊椎动物的运动来不断提高拍浮机器人的能力。
有一天可以用作更前辈的水下航行器的还有另一个目的:带有感官反馈的鱼类复制品供应了对鱼类神经力学及其形态智能的主要见地,从而推动了生物学领域的发展。
关于这项研究的论文最近揭橥在《Advanced Intelligent Systems》杂志上。